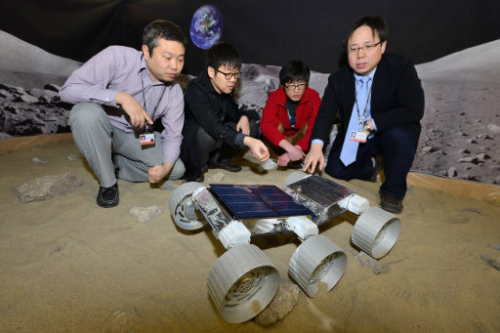
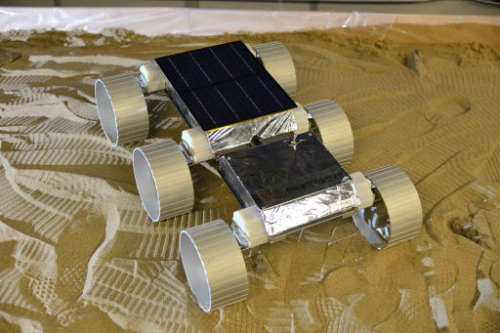
2020년 달 탐사를 추진 중인 우리나라의 기술로 만든 로버가 처음 공개됐다. 한국과학기술연구원(KIST) 달탐사연구사업추진단은 16일 달 표면에 착륙해 이곳저곳을 누비며 다양한 과학탐사와 관측 활동을 하는 로버의 기술검증모델 ‘KIST 로버’(사진)를 공개했다. KIST 로버는 높이 25㎝, 길이 70㎝, 폭 50㎝에 바퀴가 6개 달린 소형 카트 형태의 무인 장치이다. 울퉁불퉁한 달 표면에서 안정되게 주행하도록 차체가 앞뒤 2개로 분리됐다.
KIST 로버는 무엇보다 혹독한 달 표면의 환경에 적응해 옥토끼호의 전철을 밟지 않도록 설계됐다는 게 KIST 측 설명이다. 먼저 낮과 밤이 14일에 1번씩 바뀌어 300도(영하 170도∼영상 130도)에 이르는 온도차에도 작동할 수 있도록 열 제어가 용이한 디자인을 갖췄다. 대기가 없어 우주 방사선에 적나라하게 노출되는 환경인 만큼 구동 시스템인 모터와 제어기를 단일 몸체로 제작해 대처했다. 달과 같은 진공상태에서는 액체 윤활제를 쓰면 날아가 버린다. KIST 측은 고체 윤활제를 적용해 우주환경 윤활기술을 확보하는 성과를 거뒀다.
두랄루민(알루미늄 합금) 바퀴와 탄소섬유강화플라스틱 몸체로 경량화해 자체 무게는 옥토끼호의 6분의 1에 불과하고, 최대 이동속도는 초속 4㎝에 이른다. 옥토끼호는 초당 2.8㎝다.
황계식 기자 cult@segye.com
[ⓒ 세계일보 & Segye.com, 무단전재 및 재배포 금지]
![[설왕설래] “내 전임자는 바쁘다”](http://img.segye.com/content/image/2024/04/19/128/20240419515315.jpg
)
![[기자가만난세상] ‘세월호 증인’ 팽목항 기억되길](http://img.segye.com/content/image/2024/04/19/128/20240419515247.jpg
)
![[조경란의얇은소설] 아버지가 지금 있는 곳](http://img.segye.com/content/image/2021/10/29/128/20211029514141.jpg
)
![[박일호의미술여행] 싸움은 이제 그만](http://img.segye.com/content/image/2024/04/19/128/20240419515306.jpg
)