네이버가 연내 2000㎞에 달하는 서울 주요 4차선 도로에 대한 고정밀 레이아웃 지도를 완성하겠다는 포부를 드러냈다. 이를 통해 상용화 가능한 자율주행기술도 선보인다는 계획이다.
네이버 선행기술 조직(자회사)인 네이버랩스 석상옥 대표는 25일 서울 용산구 서울드래곤시티 호텔에서 기자간담회를 갖고 앞으로 3년간의 도전 과제와 기술 로드맵을 발표했다.
지난 3월1일 취임 후 이날 처음으로 기자들과 만난 석 대표는 네이버랩스의 기술 최종 목적지인 ‘에이시티(A-CITY)’에 대한 구상으로 키노트를 시작했다.
2015년 프로젝트 시작 후 2017년 네이버에서 분사한 네이버랩스는 2년 반이란 기간 동안 자율주행기술 및 로보틱스 분야에서 많은 성과를 냈다.
“이제 1라운드를 끝내고 2라운드를 시작하려 한다”는 석 대표는 “네이버의 서비스를 우리가 살고 있는 일상 공간으로 연결하겠다는 게 2라운드의 미션”이라고 설명했다.
그에 따르면, 고성능센서와 인공지능(AI) 로봇, 자유주행기술 등이 대중화 임계점에 다가서며 물리공간과 가상공간의 경례를 허물고 있다. 이에 네이버는 생활공간을 서비스 플랫폼으로 확장하겠다는 목표 아래 로보틱스나 자율주행서비스를 연구 중이다.

이를 위해 네이버가 가장 먼저 주목한 것은 ‘지도’다. 한 마디로 ‘머신리더블 3D/HD 맵(지도)’로 휴대폰 디바이스나 로봇, 자율주행차량 등이 보는 지도를 말한다.
석 대표는 “공간 속 머신이 어디 있는지 정확히 (위치를) 알게 되면 어디로 갈 수 있는지도 알 수 있게 된다”면서 ▲도심의 모든 공간을 디지털화해 실내, 인도(人道), 도로까지 스캔해 공간 데이터를 구축 ▲데이터 결과를 이용해 장소·환경·목적에 따라 이동할 수 있는 자율주행 플랫폼을 개발 ▲일상공간에서 사람들과 인터랙션하며 서비스를 제공하는 것 등 세 단계를 설명했다.
그러면서 석 대표는 공간과 모빌리티를 합친 개념인 ‘움직이는 공간(Autonomous Spaces)’이 미래 도시가 갖게 될 제3의 인프라라고 말했다. 동산과 부동산을 결합해 ‘자동산’이라는 개념도 언급했다.
그는 “공간이 자율적으로 이동하면서 정보와 서비스, 상품 등을 담아내는 완전히 새로운 연결이 가능해진다”면서 “우리가 말하는 많은 차세대 기술들이 움직이는 공간에서 이뤄진다. 새로운 콘셉트의 기술이 우리 사회의 미치는 영향을 매우 클 것”이라고 내다봤다.
이어 석 대표는 에이시티에 관해 “사람과 머신 등의 자연스런 연결을 통해 만드는 미래 도시상”이라며 “제3의 인프라인 자동산이 도시의 모든 영역을 유기적으로 연결해 전에 없던 새로운 방식의 일상 서비스를 제공하는 미래”라고 설명했다.

석 대표는 또 에이시티의 ‘에이(A)’는 도심의 각 공간을 스스로 이동하며 연결하는 오토노머스(‘A’utonomous) 머신, 공간과 상황·환경의 방대한 데이터를 분석하고 예측하는 ‘A’I(인공지능), 공간의 정보화 및 업데이트 자동화, 물류·배송 등 자동화 인프라를 뜻하는 오토메이션(‘A’utomation) 시스템, 여기에 더해 공간 자체를 사용자 인터페이스로 활용하는 ‘A’R(증강현실) 인터페이스까지 다양한 기술을 포함하는 개념이라고 설명했다.
그는 “에이시티라는 궁극적 목표를 달성하기 위해 도심 속 실내와 도로, 인도 등 모든 공간을 고정밀 지도 데이터로 통합하고, 장소·환경·목적에 따라 다양한 변용이 가능한 지능형 자율주행머신을 구축하려 한다”라며 “여기에 인터랙션 기술을 더해, 사용자들에게 네이버와 연계된 정보·서비스를 제공할 것”이라고 덧붙였다.
◇ 백종윤 리더 “네이버 자율주행기술… 레벨 4까지 왔다”
이날 백종윤 자율주행그룹 리더는 “자율주행 기술은 다양한 기술이 융합된 기술”이라며 “지도를 잘 만들고 ‘내 위치’를 인식하고 주변 다른 차량이나 장애물 인식해서 모든 정보를 융합적으로 활용해서 분석하고 자율주행까지 이어지는, 마치 ‘종합예술’ 같다”고 말했다.

이날 그는 “2017년 분사 후 국토교통부 자율주행 인증을 받아 꾸준히 테스트하며 개발 중”이라며 “네이버는 도심에서 SAE 레벨 4 수준(레벨 3.99 이상) 자율주행기술 보유하고 있다”고 말했다.
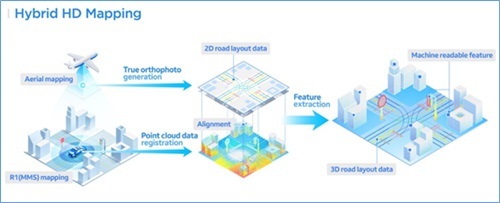
그는 라이다(LiDAR), 레이다(RADAR), 카메라, HD맵 등 다양한 센서를 활용해 차선을 인식하는 기술(퍼셉션), 딥러닝과 컬러 카메라를 이용한 신호등 인식 기술, 그리고 항공사진 이미지와 자체 개발 MMS(mobilemapping system)인 R1이 수집한 데이터를 유기적으로 결합하는 방식으로 HD맵을 신속하고 정확하게 제작하는 ‘하이브리드 HD 매핑’ 솔루션 등을 소개했다.
그러면서 “이를 활용해 마곡 상암 여의도 강남 등 자율주행차량이 많이 다니는 지역 샘플 매핑 중에 있으며, 오는 7, 8월까지는 매핑을 완료할 예정”이라며 “향후 매핑을 확대해서 서울 2000km 서울 거의 대부분을 커버하는 4차선 이상 도로에 대해 연내 로드레이아웃 지도를 완성하겠다”고 밝혔다.
도심은 음영 지역이 많아 GPS만으로는 자율주행 시 안전성을 보장하기 어렵기 때문에 네이버는 자율주행머신의 두뇌이자 센서가 되는 ‘HD맵’ 기술을 자체 개발하는 것에 한발 더 나아가, 최신 정보로 신속한 업데이트를 위한 ‘어크로스(ACROSS)’ 솔루션 제작에도 박차를 가하고 있다.
또한 네이버랩스는 HD맵에 10cm 이하 정밀도의 측위(Localization) 기술도 개발하고 있다. 이는 도로를 자율주행하는 차량이나 로봇들이 차선 밖으로 나가지 않게 하는 기준이다.
백 리더는 “네이버는 도로를 달리는 머신 플랫폼을 만들기 위해 여러 기술을 개발 중이고, HD맵을 활용한 로봇·자율주행머신을 가지고 다양한 서비스 시나리오를 구축할 수 있을 것이라 생각한다”라며 “우리가 이런 기술 개발에 앞서나간다는 것은 다른 나라에 데이터를 뺏기지 않는다는 의미이기도 하다”라고 말했다.
◇ 석상옥 대표 “사진 1장으로 내 위치 파악, VL 기술은 세계 최고 수준”
공간과 사용자, 머신을 연결하기 위해서는 지도 만드는 기술(매핑)이 선행돼야 하며, 특히 로보틱스 연구를 위해 실내공간(인도어) 지도가 필요하다.
네이버랩스는 현재 사진 한 장으로 ‘내 위치’를 파악할 수 있는 기술도 개발 중에 있다. 이를 통해 차도뿐 아니라 실내, 인도 등에서도 로봇 자율 주행이 가능해진다.
석 대표는 3차원 실내 지도 제작 로봇인 M1의 업그레이드 버전 ‘M1X’를 활용해 스캔한 인천국제공항, 코엑스몰 등 대규모 실내 3차원 지도를 이날 공개했다. 인천공항 지도는 M1X가 40시간 스캔해 만들어진 결과물이다. 석 대표는 M1X를 통해 기존 대비 제작 단가를 낮추면서도 위치 정확도가 30% 상승했다고 전했다.
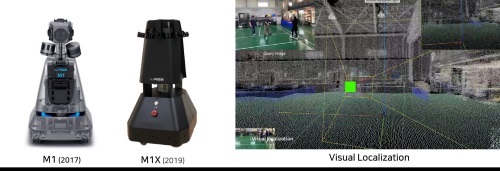
이렇게 제작된 실내지도를 기반으로 비주얼 로컬라이제이션(VL, Visual Localization) 기술도 발전시킬 수 있었다.
석 대표는 “GPS가 통하지 않는 실내에서도 1장의 사진만으로 자신의 정확한 위치를 입체적으로 파악할 수 있다는 점이 핵심”이라며 “고해상도 카메라로 사진을 찍으면 딥러닝을 통해 공간의 피처를 탐색해 매칭하고 삼각측량법을 이용해 정확한 내 위치를 알아낸다. 정밀도는 평균 오차 20cm 이내로, 다른 인프라를 전혀 안 쓰고 사진 1장으로 내 위치를 파악하는 좋은 기술이다. 해외에서도 이 기술은 아직 찾아보지 못했다”고 자부했다.
특히 네이버랩스의 로봇들은 고가의 레이저 스캐너가 없는 자율주행 로봇 플랫폼이다. 네이버의 가장 최근 버전 자율주행 로봇인 어라운드G는 40만원짜리 카메라 센서만으로 길찾기 등 여러 기능을 구현해낸다.
이날 석 대표는 다양한 환경(특히 인도)에서 이동성을 높이기 위한 4족(legs) 보행 로봇 연구도 계속 진행 중이라고 밝혔다. 바퀴가 아닌 다리 기반의 로봇은 실내뿐 아니라 인도(사이드워크) 영역까지 매핑 및 로컬라이제이션 데이터를 수집할 수 있게 한다.
이를 위해 네이버랩스 펀딩으로 MIT에서 개발한 4족 보행 로봇 ‘MIT 치타3’와 ‘미니치타’가 활용될 예정. 이들 로봇에 대한 라이센스는 네이버랩스가 가지고 있다.
석 대표는 네이버랩스유럽이 진행 중인 ‘R2D2’ 연구도 소개했다. 컴퓨터 비전 분야 글로벌 학회 CVPR에서 1위를 수상한 VL기술이다. 날씨, 계절, 시간, 조명과 같은 환경 변화와 관계없이 특정 위치를 파악할 수 있어 인도와 같은 실외공간에서 활용성이 높다.

이날 석 대표는 코리아텍과 개발한 로봇팔 ‘앰비덱스’의 허리 파트 테스트 영상도 깜짝 공개했다. 앰비덱스는 3개의 관절로 구성된 허리 파트를 통해 실내에서 더 많은 자유도를 가지고 사용자와 인터랙션할 수 있다.
마지막으로 석 대표는 5G가 가져올 로보틱스의 변화에 대해 언급했다. 5G의 초저지연성을 이용하면 차세대 로봇은 두뇌를 외부에 꺼내와 클라우드를 통해 작동하는 ‘브레인리스(brainless)’가 가능해진다. 이로써 로봇의 부피는 작아지고 제작비용도 절감할 수가 있다. 네이버랩스는 퀄컴과의 협업을 통해 세계 최초로 브레인리스 로봇을 개발, CES 2019에서 선보였다.
석 대표는 VL 기술과 5G 브레인리스 로봇 등을 합친 ‘클라우드 로보틱스’에 주력하며, 앞으로 다양한 로봇들이 클라우드에 연결될 것이라고 밝혔다.
그는 “NBP(네이버 비즈니스 플랫폼)의 클라우드 플랫폼은 앞으로 로봇의 두뇌가 될 것”이라며 “우리가 지도와 자율주행 로봇을 만드는 것은 그것들이 일상공간에 들어오게 하는 것, 결국 사람을 위한 것”이라고 거듭 강조했다.
또한 네이버랩스는 네이버랩스유럽과 함께 사회적 가치 창출의 일환으로 발달장애인을 위한 기업 ‘베어베터’와 협력한다는 계획도 가지고 있다.
마지막으로 석 대표는 “네이버랩스는 기술로 네이버 서비스 공간을 재창조하고, 공간·상황·사용자·서비스를 이어 궁극적으로 모든 공간을 네이버와 연결하는 작업을 계속 해나갈 것”이라고 덧붙였다.
현화영 기자 hhy@segye.com
[ⓒ 세계일보 & Segye.com, 무단전재 및 재배포 금지]
![[설왕설래] 반달곰 복원사업 20년](http://img.segye.com/content/image/2024/10/30/128/20241030519289.jpg
)
![[세계포럼] 기로에 선 한동훈](http://img.segye.com/content/image/2023/11/01/128/20231101522921.jpg
)
![[세계타워] 잘못된 만남](http://img.segye.com/content/image/2024/02/21/128/20240221519128.jpg
)
![[사이언스프리즘] AI를 통제할 수 있는 미래가 올까](http://img.segye.com/content/image/2024/10/30/128/20241030517692.jpg
)